Topics








Margarita Akhmejanova
Finite element approximations for variable-order fractional diffusion problems
Prof. Wenyu Lei, University of Electronic Science and Technology of China
B4 L5 R5209

Salma Kharrat


AbdulAziz Al-Orainy

Joydeep Chowdhury





Monolithic Integration of InAs Quantum Dot Lasers on Si Substrates
Yating Wan, Postdoctoral fellow at of University of California, Santa Barbara
KAUST

Walaa Khushaim

Martins Bruvelis




Ivan Vybornyi




Ivan Vybornyi
Dual Function Radar Communication Systems: Towards RF Convergence
Moeness Amin , Professor and Director of the Center for Advanced Communications, Villanova University, USA
B1 L3 R3119



IEEE Antennas and Propagation Society Distinguished Lecturer Workshop
Auditorium between Buildings 2 and 3

Muneer Al-ZuBi







Mahmoud Ouda






Maria Sara Nour SADOUN


Anas Chaaban
Ali Chelli






New Zealand Robotics, Automation and Sensing (NZRAS) Roadmap and Horticulture Robotics
B18 Fellowship Hall

Optimal Design of Agricultural Walking Robot
Prof. Sayat Ibrayev, Institute of Mechanics and Engineering
B18 Fellowship Hall


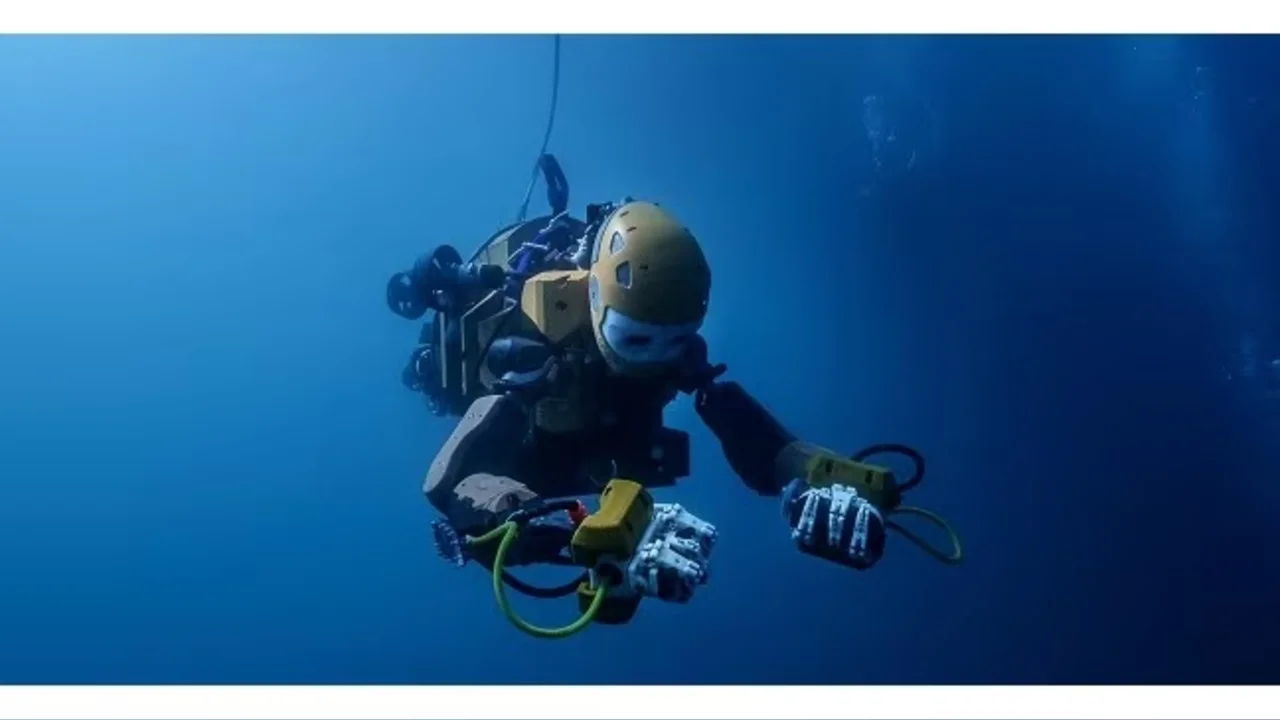
Prof. Alberto Q. Li: Towards Resilient Low-Cost Robot Teams for Autonomous Aquatic Exploration
B19 H1

Ubaidulla Pandarakkottilil








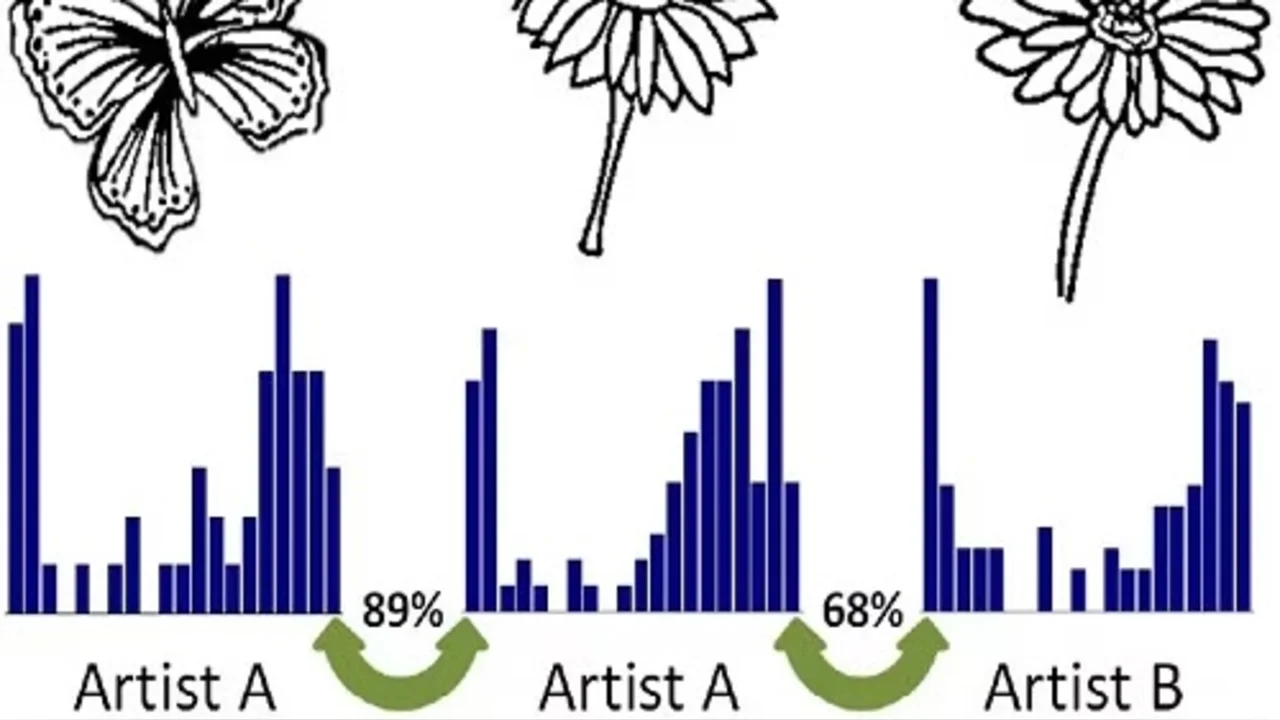
Robotics and Automation in Coral Monitoring and Restoration
B18 Fellowship Hall
The need for robotics and automatization to meet our global coral restoration goals
Dr. Sebastian Schmidt-Roach, BESE/Red Sea Research Center, KAUST
B18 Fellowship Hall





Di Wang


Semantic Communication Meets Edge Intelligence
Prof. Dusit Niyato, Computer Science and Engineering, Nanyang Technological University
KAUST














Ubaidulla Pandarakkottilil

Laila Hesham Afify



Managing subsurface uncertainties in reservoir simulations: Applications to compositional flow and geothermal extraction
Prof. Hussein Hoteit, Energy Resources and Petroleum Engineering, KAUST
B2 L5 R5220

Abdullah Bukhamsin



Flying LoRA IoT Gateway for Agricultural Applications
Prof. Samsuzana Abd Aziz, Department of Biological and Agricultural Engineering, Universiti Putra Malaysia
B18 Fellowship Hall



Core Challenges in Navigation in Human Environments
Jean Oh, Senior Systems Scientist, Robotics Institute, Carnegie Mellon University
KAUST




Pavel Krupskiy





Meng Tang

Splitting methods: merits and pitfalls
Prof. Alexander Ostermann
B2 L5 R5220